
捨棄神經網路,Google改用線性迴歸精準預測電動車充電樁狀態
Google導入線性迴歸模型預測數十分鐘內的充電樁可用狀態,導航會根據電量與站點占用變化安排路線,在大型站早晚尖峰,有效降低駕駛抵達時無充電樁可用的問題
2025-11-26

| IT周報 | google | Transformer | 機器人 | 導航 | 資料集 | 搜尋 | 大型主機
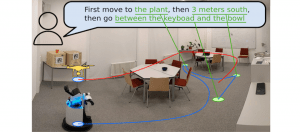
AI趨勢周報第210期:Google用Transformer模型即時導航機器人
Google成功用Transformer模型即時導航機器人,延遲僅8毫秒;司法院法庭中文語音辨識系統正式上線,準確率超過9成;Google搜尋再優化,新添資料集搜索引擎;Brave搜尋引擎自建生成式AI,幫摘要搜尋結果;IBM大型主機作業系統將擁抱AI
2023-03-09

Google推出可最佳化貨物遞送的Last Mile Fleet解決方案
Last Mile Fleet解決方案建立在Google的行車解決方案之上,能以Google地圖介面,替貨運司機規畫最佳遞送路線,並且提供消費者精確的貨物到達時間
2022-03-21


臉書以DD-PPO演算法訓練代理人走25億步後,代理人不會轉錯彎或是走進死路,能以接近100%成功率到達目的地
2020-01-23
 (CC BY-SA 4.0)")




從錯誤中學習!科學家讓無人機碰撞1.15萬次以學習如何避開障礙
一般無人機或自駕車需人類駕駛經驗以訂出自駕政策,這項研究目的是希望無人機能夠從大量的碰撞及正常飛行數據中自我學習,經過1.15萬次碰撞後,無人機已能在狹窄及凌亂的室內空間飛行並躲避障礙物。
2017-05-15

當使用者以Waze進行導航時,若是超越了該路段的限速,Waze會在螢幕上秀出限速提醒駕駛已超速,使用者也可設定自己偏好的提醒時機,例如在超速5%、10%或是15%時再提出警告。
2016-03-30