Google旗下人工智慧研究機構DeepMind收購機器人物理模擬器MuJoCo,現在對外釋出,供研究人員免費使用。MuJoCo講究精確性,對生物力學進行模擬,藉由描述複雜的運動,使機器人能夠正確運作,MuJoCo核心引擎以C語言撰寫,具有良好的程式碼移植性。
DeepMind提到,雖然人類走路時腳接觸地面,或是拿筆寫字手接觸筆,是再平常不過的事,但是從微觀尺度來看,實際上是非常複雜的動作,接觸面可能是柔軟、僵硬、有彈性、光滑或是黏稠,人類的指尖有不同類型的觸摸感測器,能夠偵測這些複雜性,完成觸摸或是抓取等任務。
MuJoCo賦予機器人處理這些物理複雜性的能力,像是處理接觸面的平衡,其接觸模型能夠準確地捕捉接觸物體的特徵,在避免接觸部位形變的狀況下,解決剛體接觸的問題,而且MuJoCo模型很靈活,提供多個參數,使用者透過調整參數,就可以逼近廣泛的接觸現象。
DeepMind強調,MuJoCo提供的是真正的物理模擬,不同於部分模擬器,是為遊戲和電影等目的設計,在考慮穩定性而非精確性的情況,可能會忽略陀螺力等條件,因此在最佳化下可能產生問題,現實和模擬出現偏差。
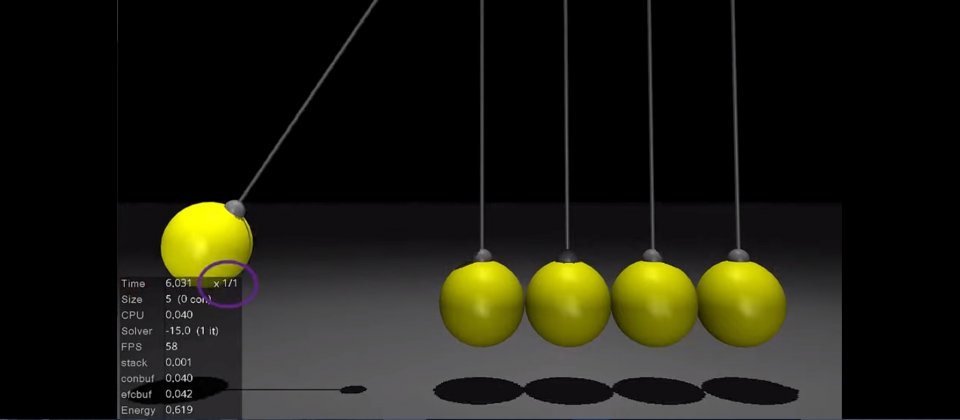
MuJoCo是一個二階連續時間模擬器,實作了完整的運動方程式,包括牛頓擺(Newton’s Cradle)和網球拍定理(Dzhanibekov Effect)等,嚴格實現支配現實世界的方程式。
而且MuJoCo核心引擎以純C語言編寫,能夠輕鬆地移植到各種架構中,該函式庫會產生決定性的結果,包括場景描述和模擬狀態,都會封裝載在資料結構中,提供所有創建模擬需要的資訊。
MuJoCo強大的功能在於,能夠模擬人類和動物的肌肉骨骼模型,像是肌肉包裹在骨骼上的狀態,因此能夠描述複雜的效果,而且MuJoCo也能夠處理力、長度、速度曲線,以及啟動狀態等肌肉複雜性。
DeepMind表示,MuJoCo已經被機器人社群廣泛使用,包括DeepMind本身的機器人團隊,也是將MuJoCo用作物理模擬器。DeepMind現在要與社群合作,一起改進MuJoCo使其成為開源軟體,在DeepMind準備程式碼的過程,MuJoCo會先以預編譯函式庫的形式免費提供外部使用。
熱門新聞

2026-02-23
2026-02-23

2026-02-20


2026-02-23

2026-02-23
2026-02-23