
iThome
【彰化車輛中心直擊】國產自駕車首度大公開。來自中部彰濱工業區的車輛研究測試中心(簡稱:車輛中心)最近首度公開自行研發的最新一輛自動駕駛車,儘管還無法像特斯拉或Google自駕車採用機器學習幫助汽車下達決策,但已經能控制汽車高速自動行駛、過彎和煞車,還具備完全自動停車功能。車輛中心研究發展處經理李玉忠表示,這臺自駕車目前已具備Level 2的自駕功能,甚至在自動停車部份更達到Level 3階段。這也是臺灣研發的第一輛自動駕駛車。
臺灣自駕車能力已經能夠到達Level 2
車輛中心從2~3年前就開始專注於自動駕駛汽車輔助系統的研發,如自動直行、彎道轉向、避開路障或行人等,目前更擁有多達百人規模的自駕車研發團隊,來各自開發不同自駕功能,最近更首度公開展示他們最新打造的一輛自動駕駛汽車,搭載他們自行開發的一套自動駕駛輔助系統,能同時整合了車道跟隨(Lane Following System,LFS)與自動緊急煞車(Autonomous Emergency Braking,AEB )這2種不同的自駕功能,能控制汽車在保持汽車自動高速行駛同時,還能主動介入控制煞車幫你煞停。
汽車駕駛人不只可以全程放開雙手,由汽車代替你開車,而且不管是直線或彎道都能開,即使遇到前方慢速行進的汽車時,汽車也能自動減速煞停,避免與前方車輛碰撞的事故發生。「若以NHTSA的自駕分類來看,這輛自駕車已經能夠達到Level 2的階段。」李玉忠表示。
美國國家公路交通安全管理局(NHTSA)將汽車自駕功能分成Level 0到Level 4共五個等級,其中 Level 0指的是未加裝電子輔助功能的汽車,Level 1~ Level 2代表汽車開始具備短暫自駕功能,如定速控制或車道維持等,當汽車到達Level 3階段代表能由汽車長時間掌控,少數涉及安全情況時,才由駕駛人接手操作,當汽車達到Level 4時,已經能夠全程完成所有駕駛操控,而不需要人為介入。
目前國內車廠不少新車款大多也停留在Level 1的階段,僅具備暫時性的自動駕駛輔助功能,例如能提供車道偏離警示或車道修正的車道維持(Lane Keeping )功能等,不過駕駛開車時雙手還是得緊緊握住方向盤,而無法全程放手任由汽車自駕系統來幫你操控。
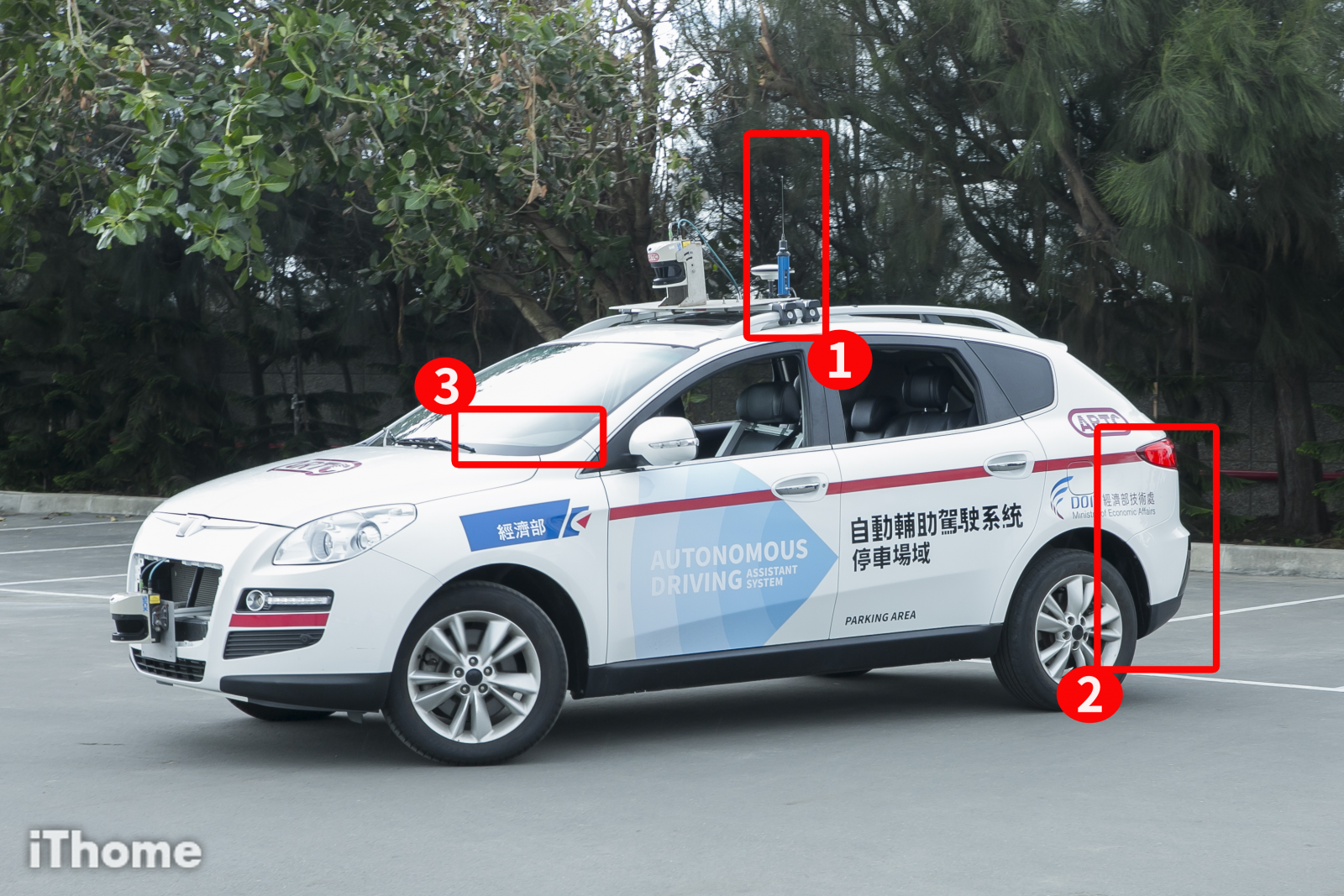
車輛中心的這輛自動駕駛車是用納智捷車款來打造而成,車上共裝有2組感測器,一組是架設在前座後照鏡上方能用來辨識車道線的攝影機,另一個是位在車頂安裝的一組2D影像雷達,可以偵測前方200公尺範圍內的物體,汽車內還配有兩組監視螢幕,可以用來監看攝影機抓取車道線的影像畫面,以及查看駕駛者有沒有踩煞車的動作。
自駕車內部靠近前座的換檔位置處還設置2組啟動自駕功能的紅色按鈕,例如只要按下其中一組LFS按鈕後,代表啟動車道自動跟隨功能,這時就會由系統來操控方向盤,保持汽車在車道中心線行駛,只要再按一次就會取消自駕功能,由駕駛員接手操作。
李玉忠表示,汽車自動駕駛期間,車上攝影機會將捕捉到位在車道兩端的白色車道線的影像數據,提供自駕系統判斷汽車現在行駛的位置有沒有偏離中間車道,藉此來控制修正方向盤的轉動角度。車輛中心人員現場也實際測試這臺車的自動車道跟隨功能。記者現場實際體驗時,短短幾分鐘的車程,測試人員一路都沒有碰到方向盤而交由汽車自己駕駛,不只在直線道路能開,甚至是遇到彎道都能保持穩定開在道路中間而不會左搖右晃,且均速都能維持在時速80公里。李玉忠說,目前測得最快時速能達到120公里。
此外,車上的攝影機不只能辨識車道線,也能即時蒐集道路資訊,例如可偵測前方障礙物,並和雷達影像資訊結合,來提供系統判斷前方是否有人或物體,來達到自動緊急煞車。李玉忠也透露,這輛自駕車輔助系統將攝影機蒐集的影像資訊拿來辨識分析時也會結合機器學習技術,來幫助系統能正確辨識前方的物體是車輛還是行人,透過將攝影機拍攝的道路資訊,並結合雷達影像資訊,持續餵給機器學習做影像辨識的訓練,「至今這輛車在汽車車輛辨識準確度已經能夠達到95%。」李玉忠說。
不過相較於車輛辨識,李玉忠坦言,在行人方面辨識效果則沒有汽車高,只有在辨別身高80公分以上的行人時比較沒問題,若要辨識騎車或騎腳踏車的人時,因為還沒有找到共通特徵來做訓練,因此辨識上就容易會有問題。李玉忠表示,之後也將會採用較高精準的3D影像雷達取代目前的2D感測雷達,並輔以結合攝影機來取得更完成道路環境資訊,來提供機器學習訓練,希望未來不管是行人、機車或腳踏車的影像辨識都能夠達到95%以上。
國內首度展示完全自動駕駛停車應用
除了車道跟隨與自動緊急煞車功能以外,車輛中心還在現場首度公開展示了他們在停車場域的自動輔助駕駛新功能。不同於目前少數高階新車款才有搭載的自動停車功能,駕駛得先開到停車位置處,才能自動控制車輛移動至停車位置,車輛中心的自駕車這次搭載的自動停車系統,駕駛人不需要自己開車到停車格來停,而是在停車場入口下車後,汽車自己就會主動幫你找到停車位置並且幫你停好車。「如果就自動停車而言,這已經達到Level 3的完全自動駕駛停車功能。」李玉忠說。
要實現完全自動駕駛停車並不容易。例如停車地面並有沒車道線可供系統做為停車路線的導引,所以為了讓自駕車能夠順利停好車,車輛中心還得在車頂特別安裝一組GPS定位裝置,並與他們空拍的高精密地圖圖資疊加後,才能依據汽車目前所在位置和距離停車格的距離,來幫助自駕系統行駛在正確的停車路線上,另外在車頂和前方也都分別安裝一個比雷達感測解析度還高的2D雷射雷達(LiDAR),才能很快速正確辨識前方通過的汽車或行人,來控制方向盤閃避和自動煞停。若以其中一組雷射雷達來舉例,李玉忠表示,每秒可以針對周圍環境記錄下多達3,600個像素點,來感測周圍道路環境的物體。
而做為這輛自駕車核心的自動停車控制系統主機,則直接放置在汽車後座的車箱中間位置,除了可以直接控制其他車上系統來完成如轉向、煞停等功能,還與兩臺PC筆電相連接,其中一臺PC負責處理這些從雷射雷達感測器所蒐集到的周圍影像數據,來幫忙做運算處理與分析,再透過汽車內部網路(CAN)與系統溝通。停車控制系統主機下方還有另一臺PC筆電則是做為訊號監測用途,能提供測試人員即時監看如GPS定位等訊號運作是否某正常。
李玉忠和自駕研發團隊還另外開發了一個能遠端與汽車連線的手機App,只要開啟App後,就能透過Wi-Fi和汽車的自動停車控制系統連結,來完成遠端遙控汽車自動開車到指定位置載人,停車時也能夠選擇想要停放的停車格位置。
現場自動停車測試時,現人解說人員也實際示範了完整的自動停車流程,可以控制汽車自動從停車場開出到繞行周圍建築物一圈後,再原路開回停車場自動停放。搭乘的人只要透過手機App下達取車的命令後,汽車就會自動從原本停好的停車格上發動引擎,開往乘客所在的指定位置接送客人上車。
從汽車自動繞行到停車場停車過程中,也加入各種交通情境來測試這臺自駕車的應對反應,這些測試項目包括了需通過前方道路縮減的狹窄路口、能夠正常通過90度彎道、完成直線車道跟隨、變換車道來避開前方故障車輛,或是在小孩過馬路時主動煞停。車上乘客下車後,只要用手機下達命令,汽車就會自動開往停車場以倒車入庫的方式自動停好車。
儘管自動停車方面,這輛自駕車已經具備高度自動行駛功能,李玉忠坦言,這輛自駕車的停車控制系統並沒有加入機器學習技術,僅能依照開發者預先設定好的電腦程式規則來執行指令,而無法因應行駛道路環境的變化,現場下達最佳的駕駛判斷,所以當如遭遇前方障礙物時,汽車自駕系統只會依照前方物體大小,來執行減速煞停和閃避的動作,並不會判斷前方道路是不是正在施工而不通,而下達改開其他條路的決定。
李玉忠表示,未來將優先針對Level 2的自駕功能推出商品化,將與臺灣車廠或系統商合作,將這些自駕技術能夠與國產新車款結合,而在自駕車研發技術上,未來1~2年內計畫將自動駕駛輔助的控制系統開始加入機器學習,甚至是更進階的深度學習能力,除了在汽車感測器方面,將更換採用感測精密度更高的3D雷射雷達,來蒐集大量環境影像資料,來做為機器學習訓練,未來也考慮結合更強大的運算處理平臺,例如Nvidia的Drive PX自駕車平臺等,來取代PC做運算,來滿足機器學習訓練的需求。
車道跟隨功能

車輛中心首度公開現場展示高速場域的自動駕駛能力,現場也用他們打造的自動駕駛汽車開上路來實際測試,這臺自駕車上共裝有2組感測器,一組是架設在前座後照鏡上方能用來辨識車道線的攝影機,另一個是位在車頂安裝的一組2D影像雷達,可以偵測前方周圍200公尺內的物體,來輔助系統完成道路的直線行駛與過彎。

汽車邊開車時會邊利用攝影機,來捕捉位在車道兩端的白色車道線,來幫助系統判斷汽車現在行駛的位置有沒有偏離車道,藉此來控制修正方向盤的轉動角度,記者現場實際體驗時,短短幾分鐘的車程,測試人員一路都沒有碰到方向盤而交由汽車自己駕駛,不只在直線道路能開,甚至是遇到彎道都能保持穩定開在道路中間而不會左搖右晃,且均速都能維持在時速80公里,另外前排座位中間還配有一臺車載螢幕能即時監看車道線的影像畫面是否正常。
.png)
自駕車內靠近前座的換檔位置處還設置兩組啟動自駕功能的紅色按鈕,例如只要按下圖中下方的一顆LFS按鈕,就會開啟車道跟隨的駕駛輔助系統,這時就會由系統來操控方向盤,保持汽車在車道中心線行駛,若要改回駕駛人操作時,只要再按一次就會取消自駕功能。 至於上方的另一顆紅色按鈕則是用來啟動自動緊急煞車功能。
自動緊急煞車功能

現場測試自動緊急煞車功能時,自駕車是在直線道路上以將近60公里的時速逼進前方的前導測試車,當系統感測到前方有汽車時,就會依據車子目前的速度跟前車距離,提前換算與前車的碰撞時間,在距離撞上前車的3~4秒前開始主動介入控制煞車幫你煞停。

汽車自動緊急煞車系統的執行反應時間大約在200毫秒。不過當距離前方車輛越來越近,汽車開始介入控制煞車時,一開始並不會直接用力煞停,而是逐漸加強煞車的力道,並持續發出聲音警示,提醒駕駛人小心注意,等到快要撞到的前2秒才會全力煞住,控制汽車完全停下來。另從車上監視螢幕觀看到的影像畫面也足以顯示,測試人員腳上並沒有任何踩踏煞車的動作,而是完全交由系統來自動煞停。

為了提高開車自駕安全,這套自駕車系統也結合了機器學習技術,來幫助系統能正確地辨識前方的物體是車輛還是行人,透過將攝影機拍攝到的道路資訊,並結合雷達影像資訊,持續餵給機器學習做影像辨識的訓練,至今在汽車車輛辨識準確度已經能夠達到95%,不過若要辨別騎車或騎腳踏車的人時,因為還沒有找共通特徵來做訓練,因此辨識上就會有問題。
完全自動停車功能
車輛中心現場也首度公開展示了在停車場域的自動輔助駕駛功能,即使並沒有結合機器學習技術,也已經能夠自動控制車輛移動至停車位置,而且駕駛人停車時,不需要自己開車到停車格來停,而是在停車場門口下車後,汽車自己會主動幫你找到停車位置並且幫忙停好車。

由於停車地面並有沒車道線,為了讓自駕車能夠順利停好車,所以在車頂上也特別安裝了一組GPS定位裝置,能與車輛中心的高精密地圖圖資交疊後,能依據汽車目前所在位置和距離停車格的距離,來幫助自駕系統行駛在正確的停車路線上,另外車頂上也安裝一個比雷達感測解析度還高的2D雷射雷達,能隨時感測前方有無汽車或行人經過而控制方向盤閃避和自動煞停。

這臺自駕車核心的停車控制系統主機是放置汽車後座的車箱中間位置,除了可以直接控制其他車上系統來完成如轉向、煞停等功能,還與兩臺PC筆電相連接,其中一臺PC負責處理這些從雷射雷達感測器所蒐集到的周圍影像數據,再透過汽車內部網路(CAN)與系統溝通。主機下方還有另一臺PC筆電則是做為訊號監測用途,能提供測試人員即時監看如GPS定位等訊號運作是否正常。

要操作這輛自駕車自動停車或開車時,即使人不用進到車內也能夠遠端操控,只要直接利用車輛中心開發的一款能遠端與汽車連線的手機App,只要開啟App後,就能透過Wi-Fi和汽車的自動停車控制系統連結,來完成遠端遙控汽車自動開車到指定位置,停車時也能夠選擇想要停放的停車格位置。
熱門新聞

2026-03-06


2026-03-11



2026-03-06

2026-03-09