
來自中興大學、陽明交大、高醫中和紀念醫院的團隊開發一套AI隨動步行復健機器人,讓患者用想的就能觸發外骨骼,協助移動。
攝影/王若樸
歷經10年研發迭代,來自中興大學、陽明交大、高醫中和紀念醫院的團隊克服挑戰,開發一套AI隨動步行復健機器人HopeStride,不只解決了坊間復健機器人行走步態不夠自然的問題,還主打用頭戴式感測器和AI演算法,精準捕捉患者想移動腳步的腦波訊號,再觸發外骨骼協助患者行走、復健,大幅提升復健成效。
超高齡社會加上醫事人力荒,科技輔助復健迫在眉睫
進一步來說,這個團隊由中興大學機械工程學系副教授李聯旺、陽明交大電控工程研究所教授柯立偉、高醫中和紀念醫院復健部主治醫師陳嘉炘領軍,分別負責系統開發設計和整合控制、腦機介面開發和腦控外骨骼,以及臨床驗證與分析。
李聯旺表示,臺灣只花了7年就從高齡社會進入超高齡社會,是世界上老化速度最快的國家。這意味著,衰弱和失能人口快速增加,尤其在臺灣,每4人就有1人終生會有中風危機,且發生率逐年增加。而過半數的腦中風患者,都會留下不同程度的偏癱或神經功能障礙等後遺症。
再加上,臺灣每位物理治療師平均每天要服務25-30位患者,且臺灣物理治療師人力不足,平均2,703人才有1名物理治療師,遠低於美國1,451人、英國1,389人的水準。面對超高齡社會的臺灣,李聯旺強調,用科技補人力已不是選項,而是迫切需要做的事。
初期鎖定低成本,幾經改良、跨域組隊終於突破創新
在國科會支持下,李聯旺團隊早在2016年就開始設計復健機器人。當時,他們盤點坊間機器人,發現搭配跑步機的懸吊支撐復健設備雖然安全,但卻有許多問題,比如自動化不夠、一次需要3位治療師輔助、患者缺乏主動意識,更重要的是,這種設備讓患者身體被動動作,對腦神經的復健成效甚微。
另一款常見的復健機器人是動態減重設備搭配外骨骼機器人,好處是安全、人力需求變低了,但因為仍是被動訓練、大腦少有學習,步態也不自然、患者無法模擬日常的行走狀態,而且這種設備成本高、普及率低。
於是,李聯旺團隊將降低成本列為首要初期目標,開發出氣動式下肢骨骼復健系統。雖然兼顧安全(動態減重)、降低10倍成本和人力需求,但步態仍不自然、大腦也少有學習,患者復健意願也低。
後來,坊間又興起另一種復健設備,也就是拐杖平衡式移動外骨骼。它改善了無法模擬日常行走狀態的痛點,但仍有著被動、安全疑慮等問題,尤其是拐杖使用,限制了偏癱和高齡長者的使用。
因此,李聯旺團隊又改良這些缺點,在2022年開發移動式多功能步態訓練機,兼顧了安全、符合實際環境訓練和多功能模式,但因身體擺幅受限、步態仍不自然,也缺乏腦控行走神經的重塑。
為克服這些痛點,李聯旺團隊聯手陽明交大教授柯立偉、高醫中和紀念醫院復健部主治醫師陳嘉炘,來跨領域開發新一代復健機器人。
結合非侵入式頭戴感測器和AI、精準捕捉腦部訊號,用想的就能走
他們在今年完成開發AI隨動步行復健機器人,改善了原有缺點之外,還有幾大亮點。
其一是「主動用腦走」。簡單來說,柯立偉團隊設計一款非侵入式、如頭戴式耳機的穿戴裝置,患者戴在頭上,可捕捉其想動腿走路的腦部EEG訊號,再經AI演算法辨識,確認為走動訊號後,便觸發下肢外骨骼移動。
患者移動後,運動訊號會再傳入感測器,再由AI辨識確認、持續觸發外骨骼移動,如此循環。這個創新應用已經過100例臨床實驗,腦控外骨骼的準確率還超過90%。

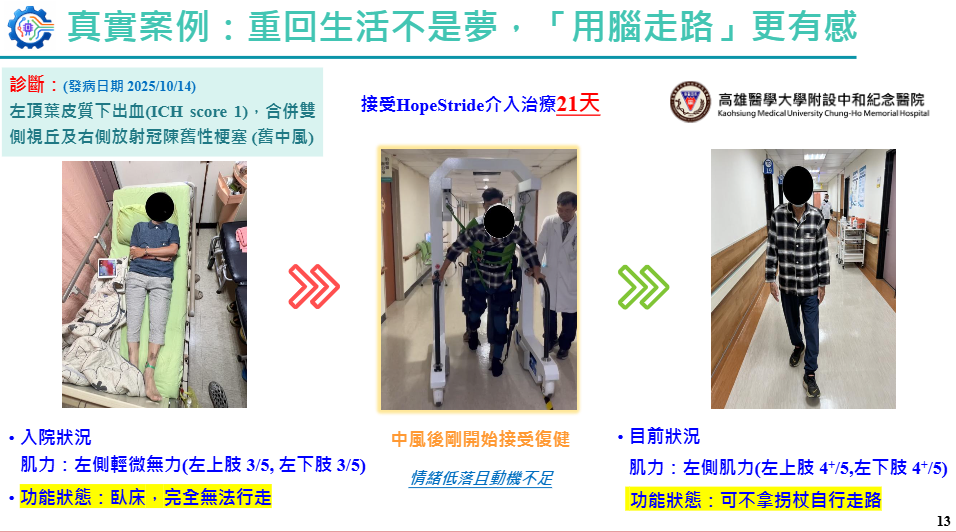
李聯旺舉例,高醫就有位病人原本入院臥床、完全無法行走,經過21天的AI隨動步行復健機器人訓練後,已可不需拐杖行走。
另一大亮點是能按需減重。李聯旺解釋,他們研究發現,一般人走路時,身體重心會不斷變化,而傳統復健設備多採「平均減重式」的動態減重設計,反而會限制身體的自然擺動,尤其減重的比例越高,身體擺幅越小,難以模擬日常行走狀態。
於是,團隊開發了可按需輔助患者的減重機制,依步態自動調整減重比例,比如腳支撐地時給予70%減重目標、擺動時為30%,讓身體擺動幅度最接近自然步態。這種設計也能消除患者對跌倒的恐懼,兼顧安全、貼近日常行走情境,而且裝置還能跟隨使用者移動。
他們也進行臨床實驗,來比較被動式外骨骼復健和腦控外骨骼復健效果,發現中風個案使用被動式復健設備,雖能顯著改善平衡能力和下肢功能,心肺功能進步卻有限;而腦控外骨骼復健則能兼顧三者,皆有顯著進步。

李聯旺也補充,團隊設計該機器人平臺的初始,就以兼容、可擴充的角度來開發,因此可與各家外骨骼設備整合使用。目前,HopeStride也與一家廠商整合、進入臨床實驗中,替商品化打下基礎。
熱門新聞

2026-03-06

2026-03-06

2026-03-09

2026-03-09

2026-03-06

