在本周的AI大會上,Google展示可為機器人加入AI能力,使機器人能為自己寫程式,而不必再透過大量資料訓練。
Google研究科學家Andy Zeng說明,控制機器人最常見的方法是寫程式讓它們偵測物體、序列指令來推進制動器及回饋循環(feedback loop),命令機器人該做什麼。但是為每一項新任務撰寫規則,卻相當耗時,且需要領域知識。
現代AI語言模型已愈來愈強大,例如Google今年初發表的PaLM具備複雜的理解能力,這類語言模型以數百萬程式加以訓練而成,只要人類給適當自然語言指令,模型就能撰寫泛型程式,也能寫出控制機器人行為的程式碼。
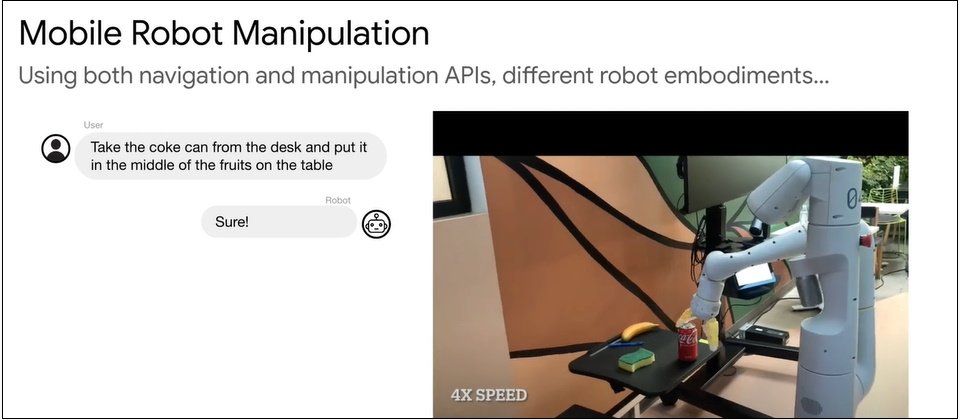
為了實現上述概念,Google開發了Code as Policies(CaP),這是將語言模型產生的程式,以實體機器人實作執行。CaP是Google早先開發的幫手機器人模型PaLM-SayCan的延伸。Google的CaP希望使用者以Python通用語言運用少量、簡單的說明,就能讓語言模型撰寫機器人程式碼,讓機器人精準執行,最終目的在可讓單一系統執行多種複雜任務,而不需特別訓練。
研究人員解釋,CaP使用一種程式碼撰寫模型,在提供了暗示(如告知它有哪些API)及範例(如命令該如何轉成程式碼)後,就能為新命令撰寫新程式碼,像是重寫API呼叫、合成新函式,表達回饋循環,以程式語言表達出來,在runtime組成新行為。
CaP可將概括化結果輸入到有知覺控制的系統,不需要像傳統機器人學習過程中蒐集大量資料才能學習。它還能運用第三方函式庫來內插數據點或分析、產生形狀;除了能泛化指令,還能將精準的值翻譯成模糊描述(例如將特定速度翻譯成「很快」)。並能套用其他語言模型,像是支援非英語指令及emoj的指令。
Google說,這策略也是在現有機器學習從「模組化」(modularity)到「泛化」(generalization)的策略,並運用開源碼及從網路蒐集大量資料外,另闢蹊徑的方法。
目前Google的CaP機器人可以執行簡單任務,像是在某區塊中間「畫5公分六角形」或是「將積木排成水平直線」。不過研究人員也坦承這系統還無法處理抽象或複雜指令,或理解較複雜的描述。
熱門新聞

2026-03-06


2026-03-11



2026-03-06
2026-03-10