蘇黎世大學與英特爾研究人員開發一個人工智慧無人機操縱系統Swift,該系統在模擬環境密集訓練後,便可以在現實環境中靈活駕駛無人機,甚至在第一人稱視角無人機競賽中,勝過3名世界冠軍選手。
人工智慧已經可以在圍棋或是電玩遊戲中勝過人類,而現在研究人員對於人工智慧技術的發展又往前邁進一步,開發了第一個可以在無人機競賽中擊敗人類冠軍的自動化系統。過去自動駕駛的無人機完成賽道的時間,是人類駕駛的2倍,除非仰賴外部追蹤系統,才能精確控制軌跡。
而新開發的Swift系統厲害之處,便是可以仰賴機載攝影機所收集的資料,即時作出反應,就如同人類賽車手一樣,Swift系統整合了慣性測量單位測量加速度和速度,並使用人工神經網路計算相機資料,在空間中定位無人機,並同時偵測賽道閘門。
也就是說,無人機除了可以感測自身運動狀態,透過人工智慧網路與攝影機,就可確定自己在空間中的位置和賽道上的物件。這些資訊被送往以深度神經網路技術為基礎的控制單元,即時選擇能夠盡快速完成賽道的最佳行動。
Swift在模擬環境中,使用增強學習經過反覆試驗自學飛行,研究人員盡可能確保模擬環境的動作結果與現實世界一致,藉由利用外部位置追蹤系統提供的精確位置資訊,讓無人機在學習自主飛行時,可以比對攝影機的資料,自動糾正機載感測器解釋資料的錯誤。
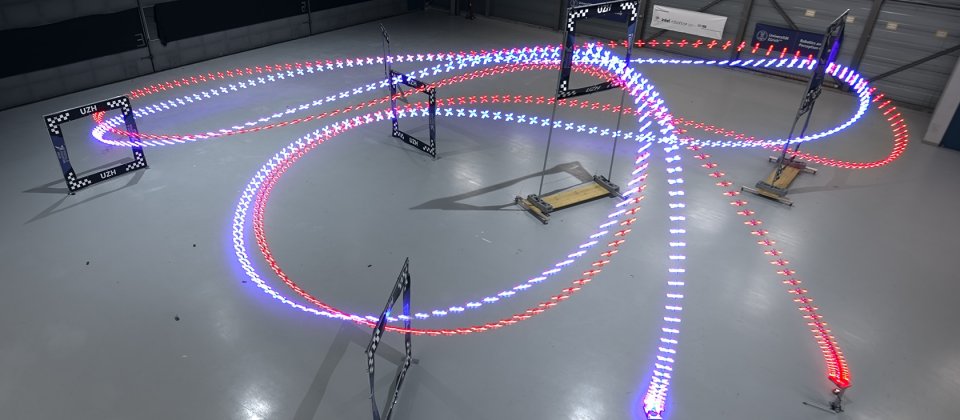
經過一個月的模擬訓練,Swift系統挑戰了2019年無人機競賽聯盟冠軍Alex Vanover、2019 MultiGP無人機競賽冠軍Thomas Bitmatta,還有獲得三次瑞士無人機競賽冠軍的Marvin Schaepper。他們在25x25公尺競賽場地中,一個由7個方形閘門組成的賽道比賽,無人機必須要按順序穿過所有閘門才算一圈,其中還必須完成Split-S這種可以快速改變飛行方向的特技動作。
Swift系統以最快圈速完成比賽,比人類駕駛員最佳成績快半秒,但研究人員提到,目前人類操作員還是比無人機更具適應性,因為當實際條件和訓練條件不同,像是房間光線過多,無人機就會失效。
挑戰無人機飛行速度的實際用處,研究人員提到,無人機的電池容量有限,飛得更快可以增加無人機的效用,像是在森林監測或是太空探索應用場景,快速飛行可以在有限時間覆蓋更大片的空間,而對於救援無人機也非常重要。
熱門新聞
2023-12-03

2024-04-24

2024-04-25
2024-04-26

2024-04-22

2024-04-22

2024-04-22