百度在3月29日宣布釋出自駕車資料集ApolloScape,這是目前世界上最大的自駕車資料集,其規模是現存資料集Kitti和CityScapes的十倍。
百度在2017年重砸百億人民幣成立Apollo基金,發展開源自駕車生態系,立志使Apollo系統成為自駕車中的Android,並在3年內發展100個自駕車專案,而ApolloScape便是其中之一。ApolloScape的開源資料,能為開發人員提供發展自駕車的基礎,其規模是現存資料集Kitti和CityScapes的十倍。
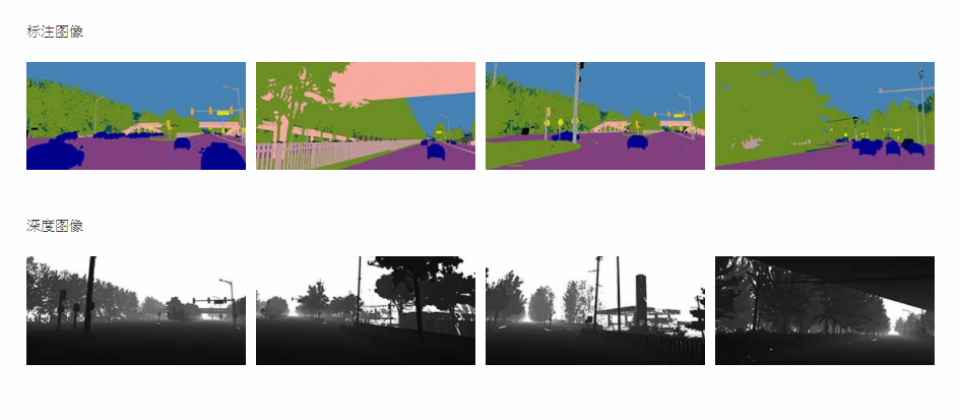
ApolloScape提供高解析度的影響,並含有每個畫素的語意標籤資訊,包含汽車、自行車、行人與建築物等26種不同的可識別物體。ApolloScape提供多個複雜度等級的場景資料,隨著等級越高,場景中的內容也越複雜,行人以及建築物數量越來越多,在特定場景甚至多達100輛車,而且環境因素也更加嚴苛,像是惡劣天氣或是極端照明條件的情境。
根據非營利智庫RAND Corporation研究,自駕車要獲得比人類駕駛多20%的優勢,需要100輛汽車全年無休駕駛500年的資料。因此無論是ApolloScape、Kitti還是CityScapes這類自駕車資料集,都能為研究與開發人員省下大量的時間。
Apollo還對外宣布加入Berkeley DeepDrive(BDD)聯盟,這是一個自駕車領域的電腦視覺與機器學習頂級研究聯盟。Apollo開放平臺與BDD將於美國鹽湖城聯合舉辦CVPR 2018自動駕駛研討會(IEEE國際電腦視覺和模式識別國際會議),屆時將會舉辦使用ApolloScape資料集的競賽。
熱門新聞

2024-04-30

2024-04-29

2024-05-01
2024-04-29

2024-04-30

2024-04-30
2024-04-28

2024-04-29